· FabLab Westharima Team · デジタル工作 · 10 min read
【Arduino】Otto DIY オリジナルロボットの制作
オープンソースの二足歩行ロボットOtto DIYをベースに、オリジナルロボットを制作。Arduinoプログラミングと3Dプリントを活用した工作記録。
2020年末、OTTO DIY(2足歩行ロボット)の動きが可愛いと、我が家でも話題になり、公式サイトにあるオープンデータで作ってみました。私の勉強のため、公式サイトの『Otto DIY builder kit』は購入せず、各部品を自分達で購入し、ボディの3Dプリント出力・電子部品のはんだ付けも実施。その際のことを備忘録としてまとめてみました。
※この記事は2020年末にOTTO DIY(Starter set.V9)を作った際の備忘録のため、公式サイトの最新バージョンとは異なる可能性があります。作られる際は公式サイトの最新情報をご確認ください。
マニュアル・3Dファイルの入手
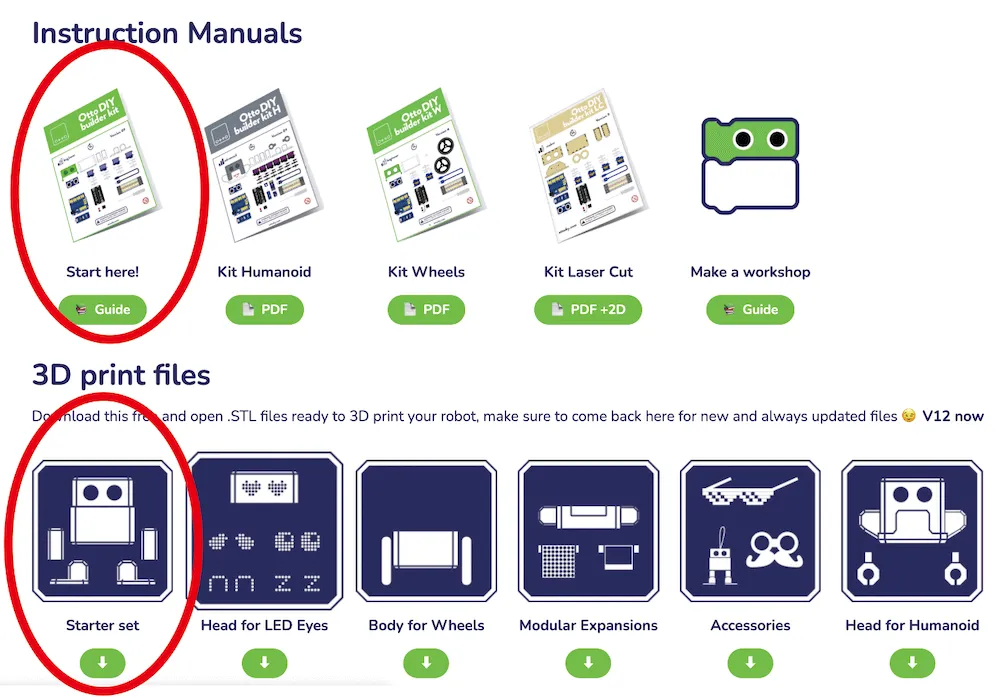
まず、私たちは、公式サイト『OTTO DIY Academy』より
一番シンプルなマニュアル『Start here!』とボディの3Dプリントファイル『Starter set.V9』を入手しました(※丸印)
機材・ツール
※この記事は2020年に作成されたものです。現在FabLabで使用している機材とは異なる場合があります。
- 3Dプリンター
- はんだごて
- 配線用ツール
現在使用可能な機材については機材一覧をご確認ください。
材料 Materials
公式サイト推奨品などを頼りに下記材料を準備しました。
1 x 超音波センサ HC-SR04
1 x 8mmロックスイッチ
1 xジャンパ線 メス-メス
1 x 電池ボックス(単3電池4本、2×2のもの)
4 x アルカリ乾電池単3
道具 Tool
やすり(3Dプリンター出力後のバリ取り用)
USBケーブル タイプA-miniB(Arduino書き込み用)
はんだづけ道具一式
【AD】オンラインで学ぶ!小中学生向けプログラミング デジタネ ![]()
事前準備
次に、組立前の事前準備をしました。
※注:公式サイトから『Otto DIY builder kit』を購入される場合、ボディとはんだ付け済の部品が含まれているので、この事前準備は不要です。
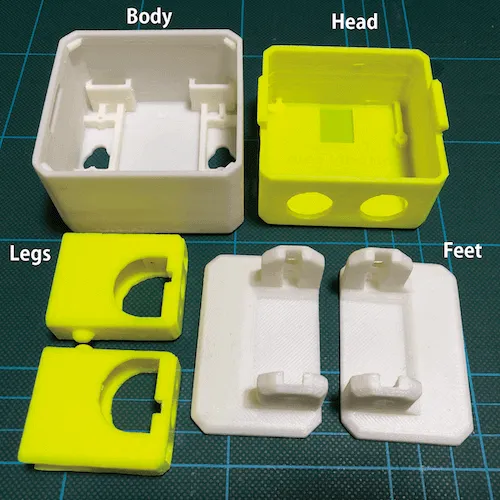
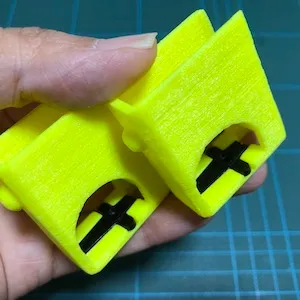
STEP 1: ボディを3Dプリント出力
※公式サイト『OTTO DIY Academy』より、3D print filesV.9を入手し、3Dプリンターで出力しました。
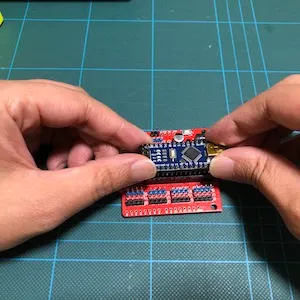
STEP 2: はんだ付け
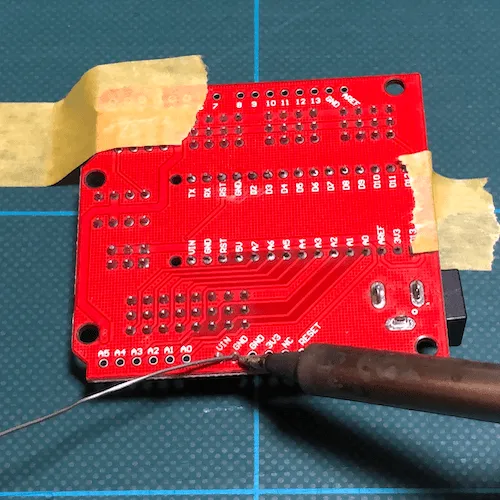
Arduino Nano I/O拡張シールド(基板)のバッテリーの2ピン
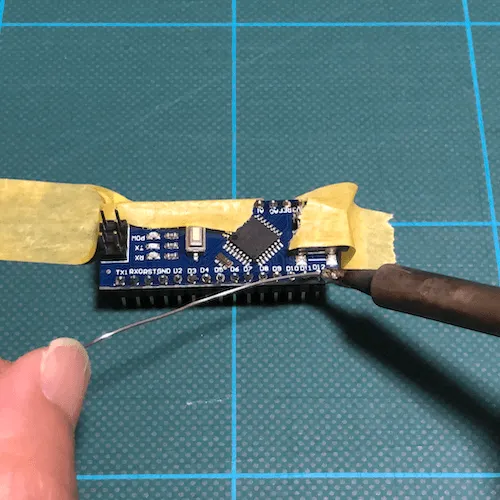
Arduinoのピン
スイッチ と乾電池ボックスの接続部分
OTTO 組み立て
全部品が揃ったので、『Otto DIY builder kitの組立マニュアル.Version10』を参考にOTTOの組み立てを開始しました。
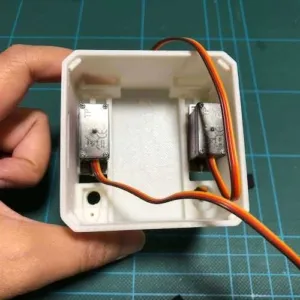
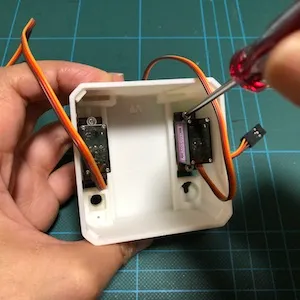
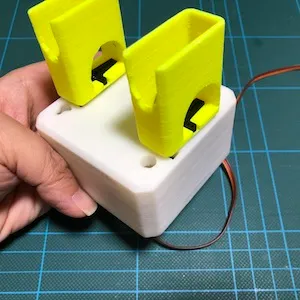
STEP 3: サーボをボディに取付・固定
サーボをボディに取付×2、長い方のネジで固定×4
※向きがあるので注意。ボディ底の穴の形とサーボの形が一致するところに取り付けました。

STEP 4: サーボホーンをLEGに取付
サーボホーンをカットし、LEGに取付×2
STEP 5: LEGにサーボを取付
LEGにサーボを取付×2
※取り付け前に、サーボを可動域(180度)の真ん中の位置に設定。
※サーボのギヤが欠けやすいので手で動かす時は注意した方がいいです。私はそれでも1つ壊してしまい、交換しました。
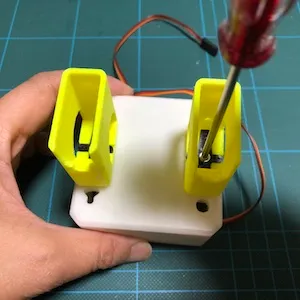
STEP 6: 短いネジで固定
短い方のネジで固定×2
STEP 7: サーボホーンをサーボに取付
サーボホーンをカットし、サーボに取付×2

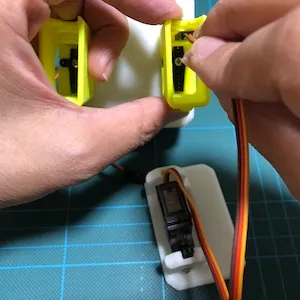
STEP 8: FOOTにサーボを取付
FOOTにサーボを取付×2
※取り付け前に、サーボを可動域(180度)の真ん中の位置に設定。
※サーボのギヤが欠けやすいので手で動かす時は注意した方がいいです。

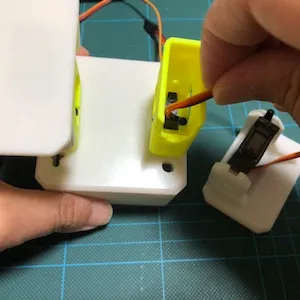
STEP 9: FOOTのサーボを固定
FOOTのサーボを短いネジ×2(上)・長いネジ×2(下)で固定

STEP 10: サーボの配線を穴に通す
両方のFOOTのサーボの配線をボディの穴に通します
※ボディの穴が非常に狭いので、なかなか通りません。苦労しました。
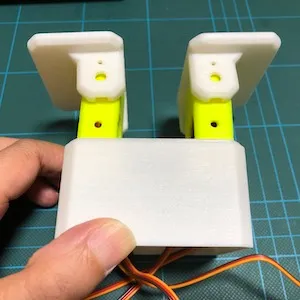
STEP 11: 脚の組立ほぼ完成
STEP 12: LEGのサーボを固定
LEGの中のサーボを長いネジで固定×2
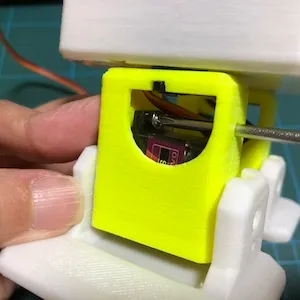
この作業はかなり困難でした。ドライバーが動かしづらい上、サーボの配線を避けつつの作業で、ネジが何度も転がってしまいました。大人でも困難な作業なので、子供は更に苦労しそうです。
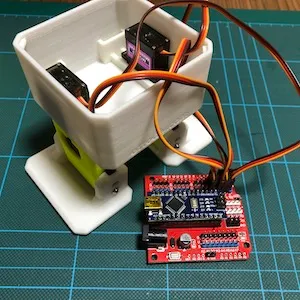
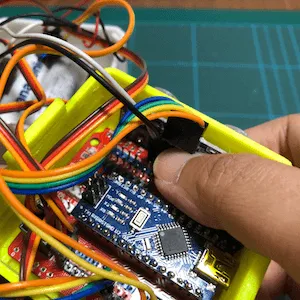
STEP 13: Arduinoを基板に取り付け
Arduino Nano I/O拡張シールド(基板)にArduinoを取り付ける
STEP 14: コネクタを基板に挿す
脚から出ているコネクタを基板に挿す×4
脚から出ているコネクタを基板に挿します。コネクタを挿す位置は公式サイトの配線図参照しました。LEG or FOOT・右 or 左がどのコネクタなのかが分かりづらかったため、『配線が短い方がFOOTかな?』と色々推測しながらピンを刺しました。(※ここで、挿し間違いがあると、完成後の足の動きがおかしくなります。)
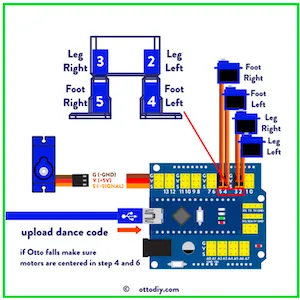
公式サイトの脚の配線図
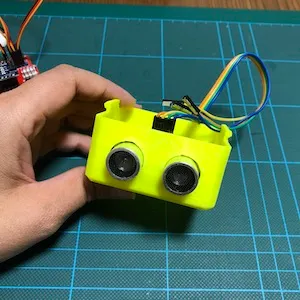
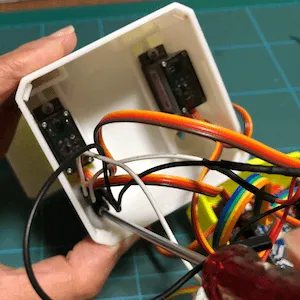
STEP 15: センサーをヘッドに取り付け
ヘッドにセンサーを取り付ける
STEP 16: センサーとブザーを配線
センサーとブザーのピンを基板に挿す
公式サイトの配線図参照の上、ピンを挿しました。
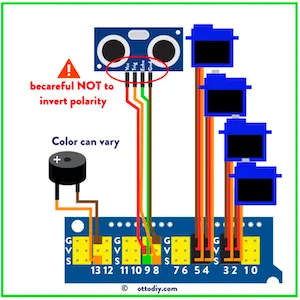
公式サイトのセンサー・ブザー配線図
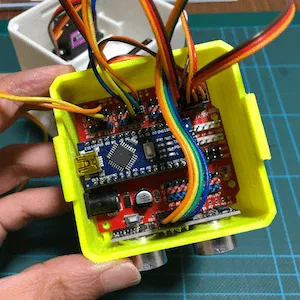
STEP 17: 基板をヘッドに取付・固定
向きに注意しながらヘッドに基板を取り付け、長いネジで固定×2
※ヘッドのサイズと基板がほぼ同サイズくらいなので、この取り付けには非常に苦労しました。
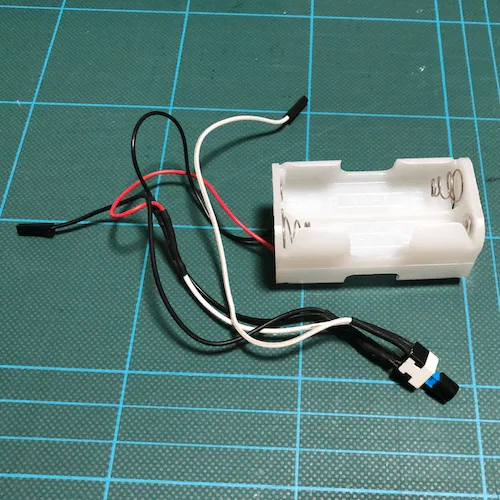
STEP 18: スイッチをボディに取付・固定
ボディにスイッチを取付、サーボホーンで止め、長いネジで固定×1
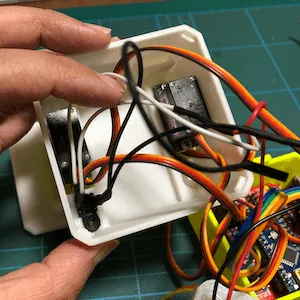
STEP 19: 電池ボックスを配線
乾電池ボックスの配線ピンを基板に挿す
※逆につなぐとショートしたり発熱するので十分注意してつなぎました。
※今回はアルカリ乾電池を使用したので、アルカリ電池の配線図の方を参照しました。
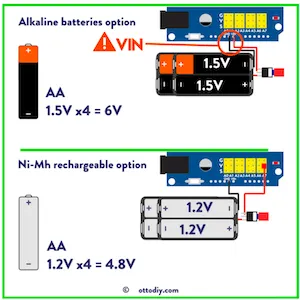
公式サイトの乾電池のピン配線図
STEP 20: ブザーを取り付け
ブザーを取り付ける

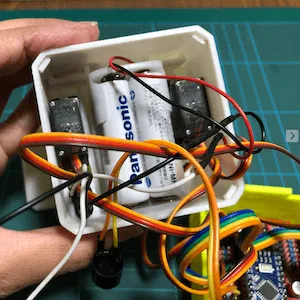
STEP 21: 電池をボディに入れる
乾電池を乾電池BOXに入れ、乾電池ボックスをボディに入れる
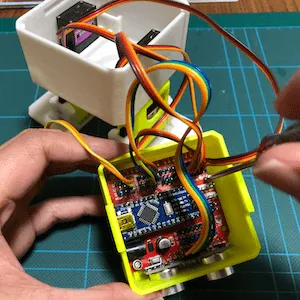
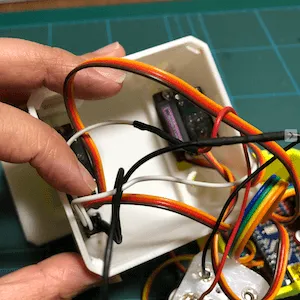
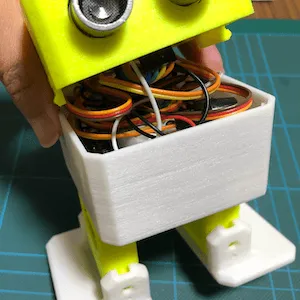
STEP 22: ヘッドとボディを閉じる
配線と部品をヘッドとボディの中に詰め込み閉じる。
配線が挟まらないように、注意しながら、ヘッドの左右のつまみにハマるところまで頭を閉じました。
配線や部品がぎゅうぎゅうに入っている感じなので、収納に苦労しましたが、なんとか納めました。
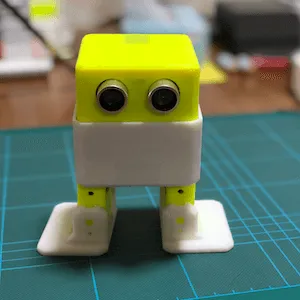
STEP 23: 完成!
【AD】オンラインで学ぶ!小中学生向けプログラミング デジタネ ![]()
まとめ・感想
電子工作初心者の私一人だけでは、はんだ付けがネックになり、途中で断念していたと思います。
電子工作に詳しくない方は電子工作に詳しい方と一緒にOTTOを作ることをオススメします。
サーボのギヤが欠けやすいので手で動かす時は注意した方がいいです。
公式サイト『OTTO DIY Academy』には、日本語翻訳版がなく、翻訳を頑張るしか手立てがないのが少し辛い。
公式サイトで組立1時間となっていましたが、私は2〜3時間必要でした。
追記:2021/11/9
久しぶりに、公式サイト『OTTO DIY Academy』を見てみるとバージョンUPしていました!近いうちに、最新版を作ってみたいと考え中。作った時に、また記事をUPしようと思っています。