· FabLab Westharima Team · 3Dプリンタ · 7 min read
Otto WHEEL Fab Lab West Harima モデル(テスト機種)組み立てガイド
FabLab West Harimaで開発した車輪型ロボット「Otto WHEEL」の組み立て手順を詳しく解説。ESP32とサーボモーターを使った初心者向けロボット製作ガイドです。
ロボット OTTO WHEEL ファブラボ西播磨モデル(テスト機種) 作成!
車輪で移動するタイプの「Otto WHEEL」 の ファブラボ西播磨モデル(テスト機種) を作ってみました。これから変更する箇所もあると思いますが、今回作ったテスト機種の組み立て手順は以下の通りです。
部品
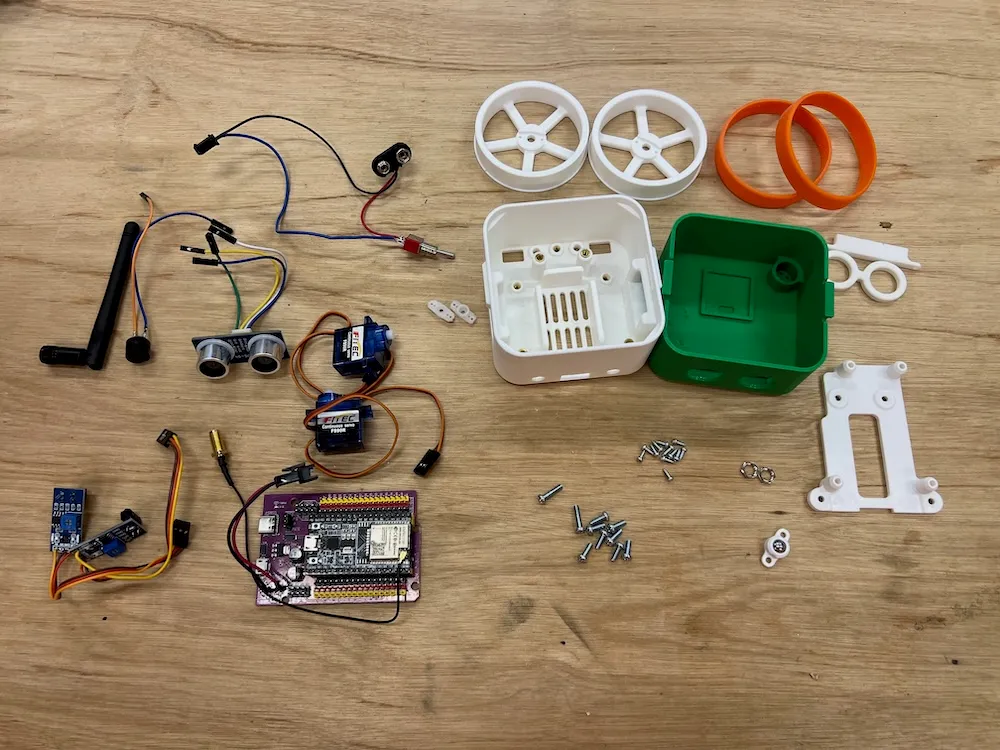
- 3Dプリントボディパーツ(頭部、本体、車輪x2、マウントx2種、メガネ)
- 2x シリコンバンド
- 2x サーボモーター FS90R
- ESP32 拡張ボード + ESP32 DevKit
- 2x ライントレースセンサー TCRT5000
- 超音波センサーRUS-04
- スイッチ
- ブザー
- ジャンパーワイヤー
- ボール 直径8mm
- ネジ、ナット類
別売部品)
- 1x リチウムイオン電池9V充電式 650mAh - 参考画像:
用意した道具
- やすり(3Dプリンター出力後のバリ取り用・必要あれば)
- USBケーブル (ファームウェアの書き込み用)
- 精密ドライバー
- ニッパー
- はんだづけ道具一式
配線時の注意事項
- ⚠️接続図をよく見て、向きに注意してください
- ⚠️向きを間違えるとショートするので注意
- ⚠️VCC/GNDの配線は特に注意:プラス(赤)とマイナス(黒)の向きを必ず確認
- ⚠️配線は短く、整理して行う:配線が絡まないように注意
- ⚠️接続前に電源を切る:配線作業中は必ず電源をオフにする
組み立てのポイント
以下を確認・理解してから、組み立てを開始します。
- ネジの締めすぎに注意:
- ネジの締めすぎは、ネジ穴を舐めてしまいます。
- ネジの締めすぎは、3Dプリントパーツが破損する可能性があります。
- ポイント:工具のドライバーはグリップをつけず、締めすぎない力加減でネジを締めましょう。
- ドライバーサイズに注意
- ネジの大きさは2種類あります。ネジサイズに合うドライバーを使用しましょう。
- 配線の確認:
- 特に電源のプラス・マイナスを間違えると、電子部品が故障する原因になるので、配線図で確認してください。
- モーターの左右:
- モーターの配線を左右逆にしてしまうと、前進・後退の動きが逆になります。その場合は配線を差し替えて修正します。接続一覧表
| センサー/モーター | ESP32 Board ピン番号 | 備考 |
|---|---|---|
| ライントレース左(アナログ) | 32 | アナログ入力 |
| ライントレース右(アナログ) | 33 | アナログ入力 |
| 左モータ | 14 | PWM出力 |
| 右モータ | 13 | PWM出力 |
| 超音波センサRGB | 18 | デジタル出力 |
| 超音波センサEcho(io) | 19 | デジタル入力 |
| ブザー | 25 | PWM出力 |
組み立て手順
1. ボディ組み立て
アンテナ取付 x1:
| アンテナをボディ(右側)の穴に差し | ナットで固定 |
|---|---|
 | 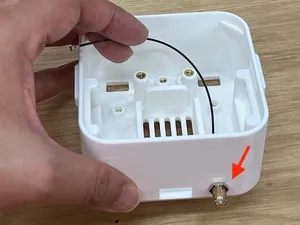 |
スイッチ取付 x1: スイッチのOFF側がボディの底側(下側)に来るように向きを合わせて取り付ける
| スイッチをボディ(左の穴)に通し | ナットで固定 |
|---|---|
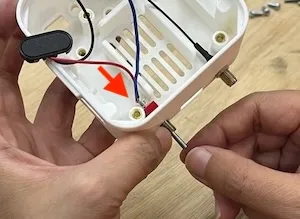 |  |
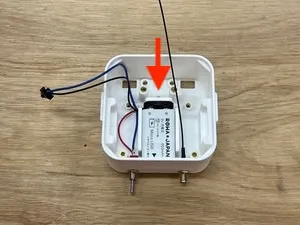
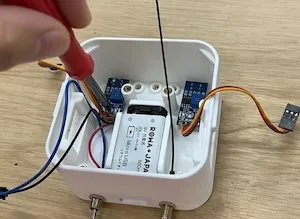
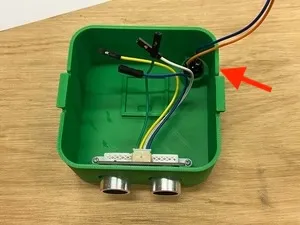
リチウムイオン電池(9V充電式)を配線につなぐ:
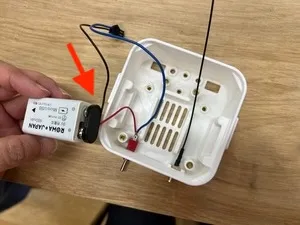
リチウムイオン電池をボディに入れる: ⚠️配線を挟まないように注意!
ラインセンサー取付(左・右):
| ネジ(M3x8)で固定 | ⚠️位置確認: ラインセンサーが歪んでなければOK |
|---|---|
 |  |
サーボ取付(左・右):
| 配線をボディの穴に通す | タッピンネジ(M2x6)で固定 ⚠️サーボの向きに注意 |
|---|---|
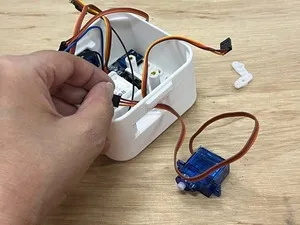 |  |
マウント取付:
| 配線を両脇に避け | マウントをネジ止め固定(M3x8) |
|---|---|
 | 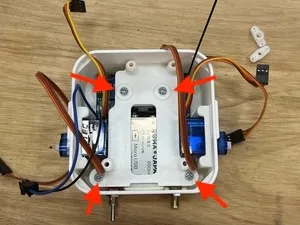 |
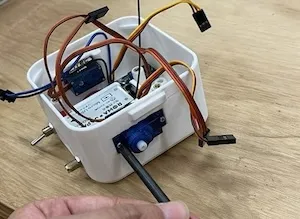
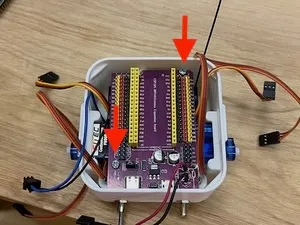
ESP32 拡張ボード取付:
- ⚠️配線を挟まないように注意!
- 対角線上に2箇所ネジ止め(M3x12)
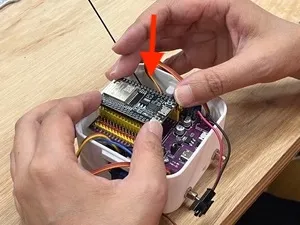
ESP32 DevKit取付: ⚠️拡張ボードのコネクタを ESP32 DevKit のコネクタに合わせて真っ直ぐ下に押し入れる。(斜めに入れない)
配線
| センサー シグナル | ESP32 Board ピン配置 |
|---|---|
| ライントレース左(アナログ) | 32 |
| ライントレース右(アナログ) | 33 |
| 左モータ | 14 |
| 右モータ | 13 |
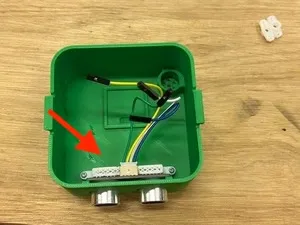
VCC/GNDの配線: ⚠️向きを間違えるとショートするので注意!プラス(赤)とマイナス(黒)の向きを必ず確認してください。
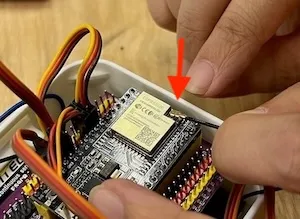
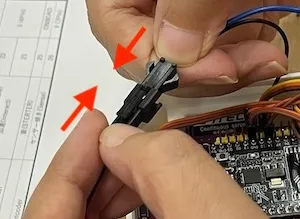
アンテナ取付: ESP32 DevKitの前面にある”Wifi Antenna Connector”に、アンテナを取付 (位置をしっかり合わせ、爪でぐっと押し込む)
バッテリーの配線: スイッチの配線についているバッテリーへの接続端子
2. 頭部組み立て
超音波センサー取付:
- 超音波センサーを頭の内側から入れる
- マウントを置き、ネジ止め (タッピンネジ M2x6 2つ)
ブザー取付:
配線 : 各センサーのシグナル: 以下のピン番号で接続。
| センサー | ESP32 Board ピン番号 |
|---|---|
| 超音波センサRGB | 18 |
| 超音波センサEcho(io) | 19 |
| ブザー | 25 |
配線 : 各センサーのVCC /GND: ⚠️向きを間違えるとショートするので注意!

頭とボディの合体
- 頭とボディの向きを合わせる
- ⚠️配線を挟まないように注意

3. ホイール組み立て
サーボホーンの準備 2箇所、タッピンネジ M2x6 が入るよう、穴を少し大きくする。 (サーボホーンの破損防止)
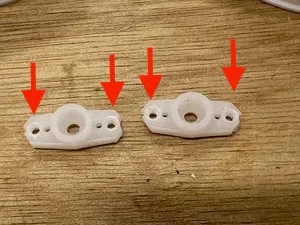
サーボホーンをホイールにネジ止め: (タッピンネジ M2x6 左右2つずつ) 
シリコンゴム取付:

組立ホイール(左/右)をサーボにネジ止め:
タッピンネジ M2x6 (左右1つずつ)
| ネジ止め位置 | ネジ止め後の写真 |
|---|---|
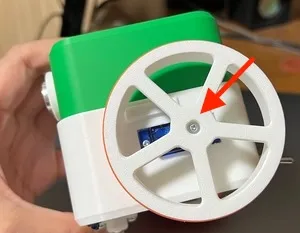 |  |
4. ボール取付
| 1.ボールをマウントに入れる | 2. ボディにネジ止め (M3x8 2つ) |
|---|---|
 |  |
5. アンテナ取付
| 1. アンテナ取付 | 2.アンテナを立てる |
|---|---|
 |  |
6. 完成&動作確認
バッテリーホルダーに電池を入れ、電源スイッチをオンにします。
事前にプログラムが書き込まれている場合、ロボットが動き出します。プログラミングが必要な場合は、PCに接続して専用ソフトウェア(Otto Blocklyなど)でプログラムをアップロードします。