Otto DIY - Humanoid Making マニュアル
Otto DIYの始まり
Otto DIYは、誰でも手軽に組み立てられるオープンソースの二足歩行ロボットとして誕生しました。3Dプリントされたパーツと市販の電子部品、そしてArduino互換マイコンを利用することで、比較的低コストかつカスタマイズ性の高いプラットフォームを提供しています。創始者Camilo Parra Palacio氏は、子どもや初心者にもロボットを通じた学習や創作の喜びを体験してもらうことを目指して、2016年頃にプロジェクトをスタート。以降、多くのエンジニアや教育者、クリエイターたちがコミュニティに参加し、国境を越えた情報共有や改良が行われてきました。

Otto DIYの特徴
- オープンソース:3Dデータや回路図、プログラムが公開されており、世界中のユーザーが自由に改変・再配布可能。
- 学習プラットフォーム:子ども向けワークショップやSTEM教育の教材として採用され、ロボティクスやプログラミングの基礎を実践的に学べる。
- コミュニティの貢献:世界各地のメンバーがコードやデザインのアップグレードを共有し、多言語のドキュメントも充実。
- 簡易モジュール化:センサーやLED、スピーカーなどを拡張可能。人感センサーで動き出す、音楽に合わせて踊るなど、多彩なアレンジが楽しめる。
ファブラボ西播磨モデル
「Otto DIY - Humanoid」の組み立てにくい箇所の改良をファブラボ西播磨にて実施。ファブラボ西播磨版の組み立て手順は、以下の通りです。
[0.事前準備] 180°サーボ「サーボセンタリングcode」をマイコンへUpload
0:ソフトウェアの準備:
【Windowsの場合:】 Otto blockly Windows softwareインストール(初回のみ)
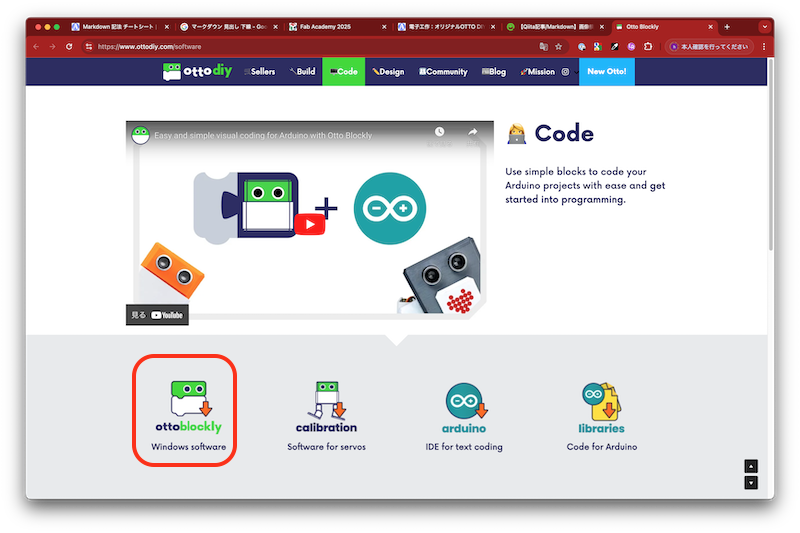
- Ottoblocklyを開く
- サンプルコード「servo centering」に「ピン設定」を追加.(下図参照)
- マイコン・ポートへ接続> Upload 注意:
- 今回:マイコン:Nano/ USBポート:COM3
- Nanoで書き込み不可の場合、Nano Oldに変え書き込みしてみてください
- パソコンや挿したUSBポートによって、ポート番号は変わるので、番号自体は気にしないでください
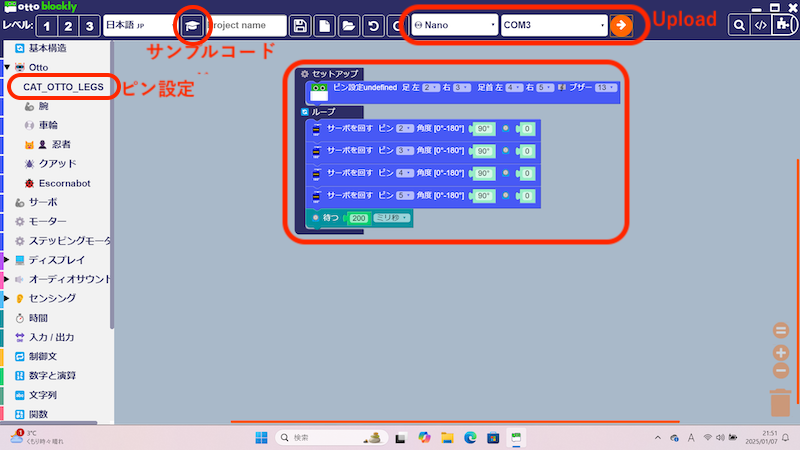
- upload完了後、マイコンに電源5Vを入れると、サーボセンタリング作動します
では、組み立てを開始。
Leg組立
サーボ取付x2
- サーボ2: Leg left
- サーボ3: Leg right
- ネジx4
サーボセンタリング
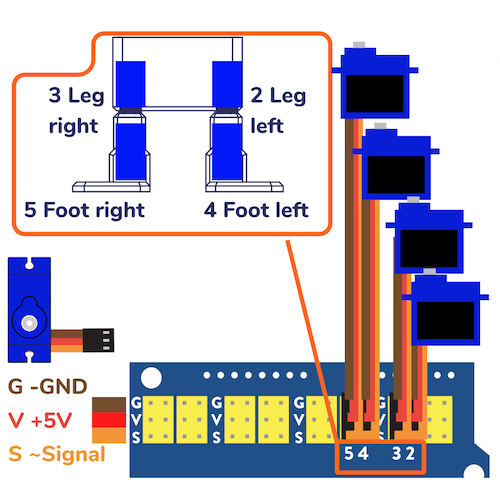
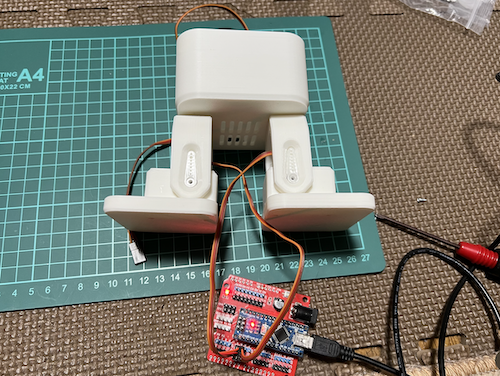
- マイコンの2番と3番にサーボを繋ぎ、電源(USBケーブル)をつなぐ。 接続図をよく見て、コネクタの向きに注意してください。
| 部品 | 接続図 |
|---|---|
 |  |
Leg取り付け
- 穴四つが見える向きにLegを置き、サーボホーンを押し込む
| 部品 | 向き注意 |
|---|---|
 |  |
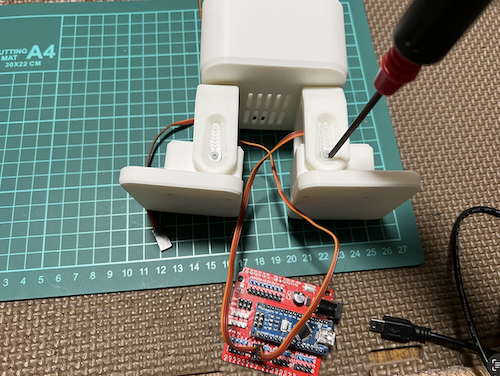
サーボホーン_ネジ止め
- マイコンからUSBケーブルを必ず外してから、サーボホーンをねじ止め ※ネジ止め中はサーボに電気が流れていない状態にする(サーボの破損予防)
Foot組立
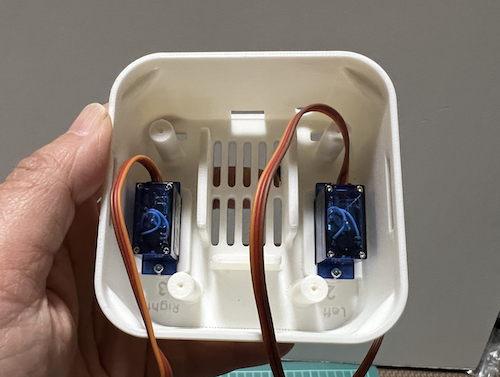
サーボ取付x2
- 赤い矢印の部品にサーボを入れる
- サーボ4: Foot left
- サーボ5: Foot right
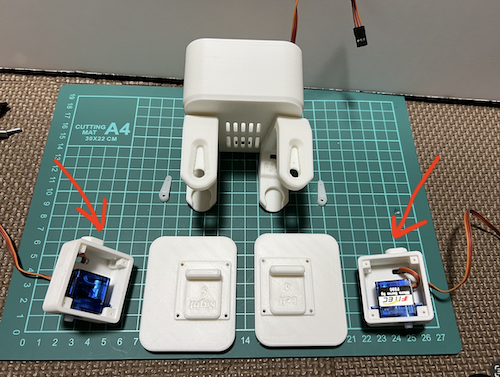
- 写真のように蓋をしてネジ止めx8 赤矢印部分に注意。RIGHTのINSIDEとLEFTのINSIDEを合わせる
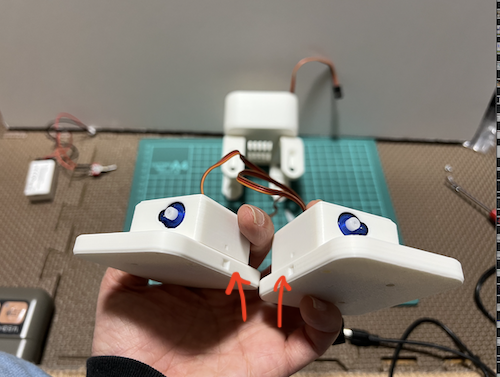
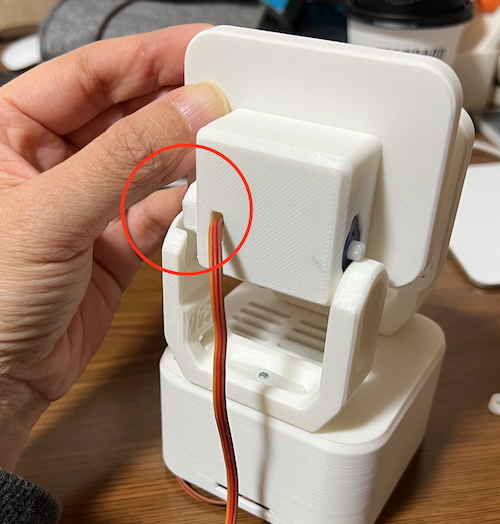
- Footをスライドし、赤丸の部分(Dカットの向き)に注意して、右左それぞれのANKLEを入れる
| 部品 | 向き注意 |
|---|---|
 |  |
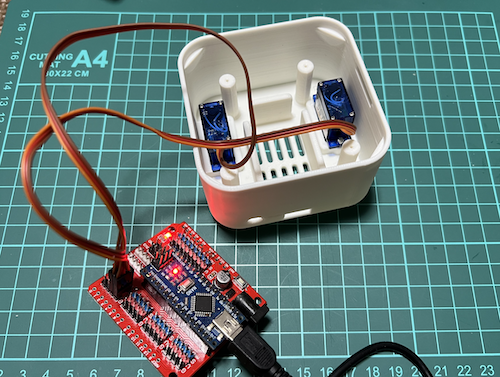
サーボセンタリング
- マイコンの4番と5番にサーボを繋ぎ、電源(USBケーブル)をつなぐ。 接続図をよく見て、コネクタの向きに注意してください。
| 部品 | 接続図 |
|---|---|
 | |
サーボホーンを押し込む
サーボホーンねじ止め
- マイコンからUSBケーブルを必ず外してから、サーボホーンをねじ止め ※ネジ止め中はサーボに電気が流れていない状態にする(サーボの破損予防)
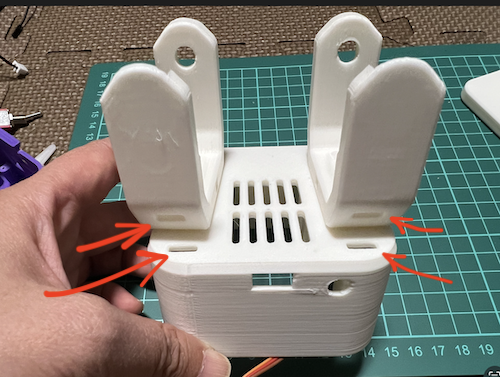
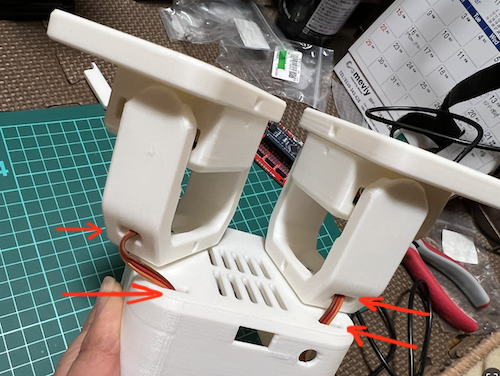
Footサーボ配線
- Footサーボの配線x2 をレッグの穴とボディの穴にそれぞれ通す
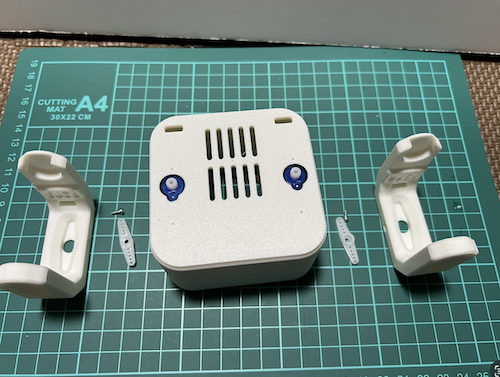
スイッチと電池取り付け
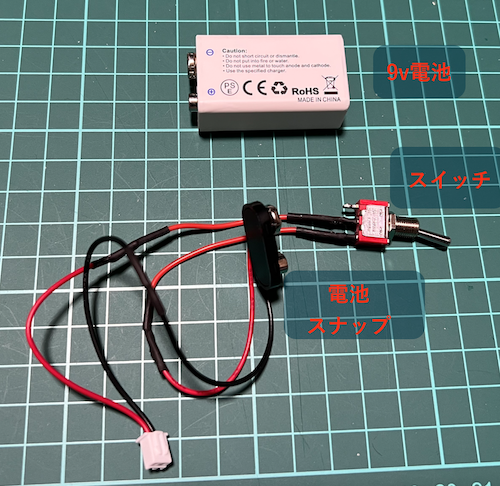
- スイッチからナットを取り外し、スイッチをボディの穴へ通す
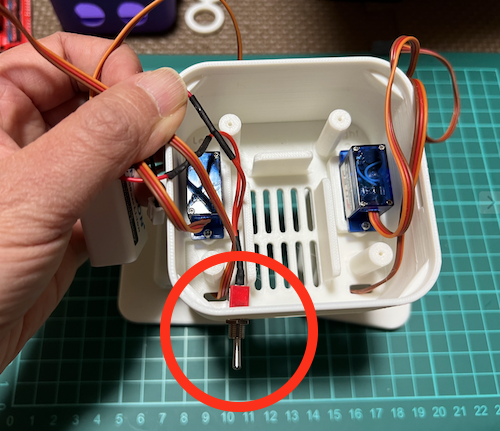
- ボディの外側から、ナットで固定

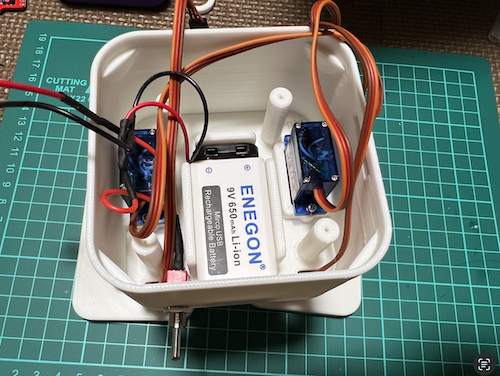
- 電池に電池スナップを接続
- 電池の線を挟まないように注意しながら、ボディに入れる
距離センサーとブザーをセット
- ブザーを入れる
- 距離センサーを入れ、固定具をネジ止めx2

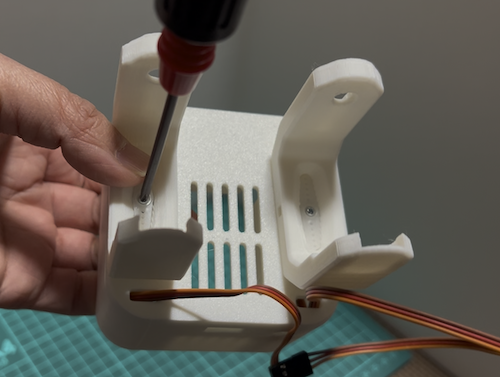
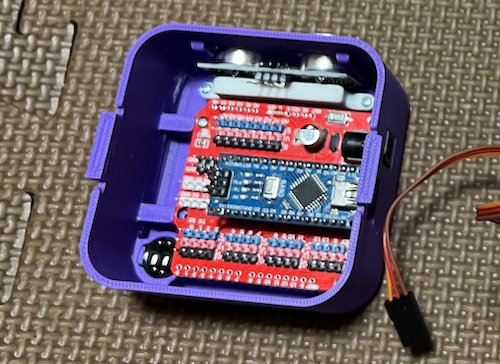
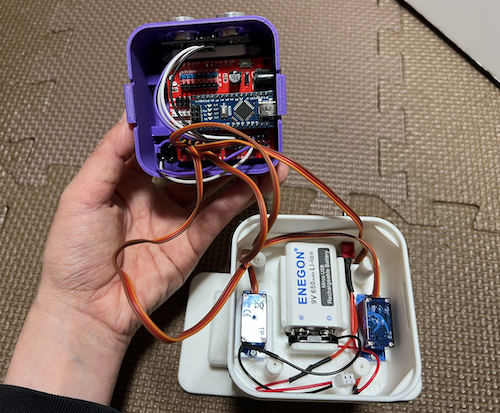
マイコンを頭に入れる
- 拡張シールドにマイコン(Arduino NANO)を取り付け
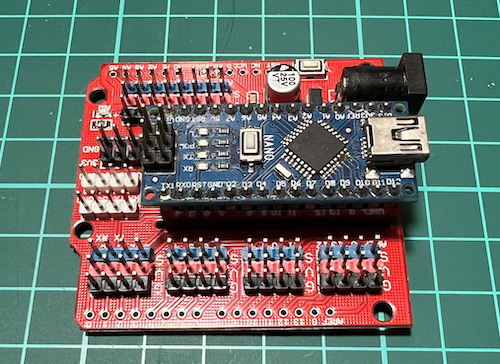
- 頭に基板をねじ止めx4 向きに注意し、ピンを曲げないように入れる
配線
- 配線図を参考に配線
- 向きを間違えるとショートするので注意!
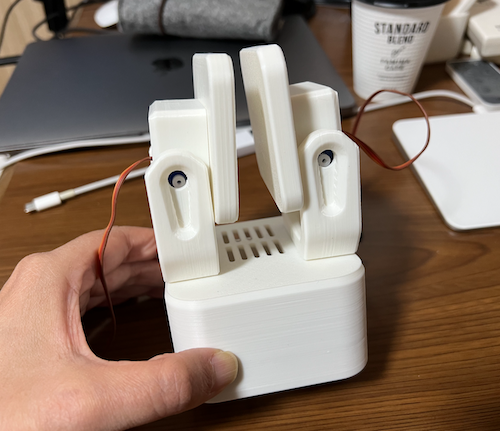
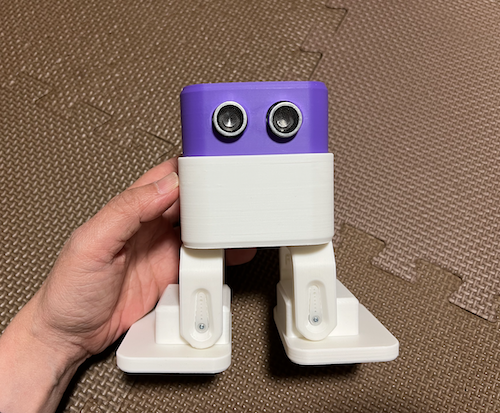
組立完成
配線図
- 接続図をよく見て、向きに注意してください。
- 向きを間違えるとショートするので注意
| サーボ(コネクタの向き注意) | 距離センサー・ブザー | ブザー注意(足が長い方が+) |
|---|---|---|
| 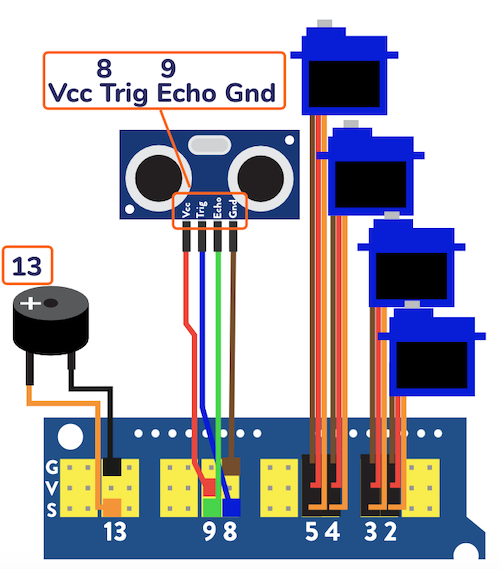 | 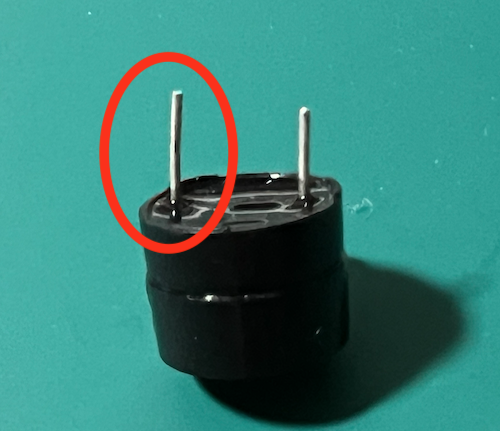 |
お問い合わせ
製作についてご不明な点がございましたら、スタッフまでお気軽にお声がけください。